




HOME ハンド&チャック ロボット周辺機器 > TECH NOTE > MOTOMAN-HCシリーズ対応 周辺機器
MOTOMAN-HCシリーズ対応 周辺機器
ページ作成日:2026.1.9
最終更新日:2026.3.11
はじめに…「MOTOMAN-HCシリーズ」とは
MOTOMAN-HCシリーズは、株式会社安川電機から発売している産業用ロボットブランド「MOTOMAN」の中でも、
「人と共に作業する」ことを想定し設計された協働ロボットです。
MOTOMAN-HCシリーズは、外部から加わる力を検知して自動停止する「安全運転」とアーム部に隙間を確保し
手や指の挟み込みを防止する「安全設計」で人との共同作業を実現したロボットです。
また、簡単操作でティーチング可能なスマートペンダントや、人が直接アームを動かし教示するダイレクト
ティーチング機能により、実際にロボットを使用するユーザーでも操作できるよう設計されています。

MOTOMAN-HCシリーズの主な特長
■安全運転・安全設計
人がロボットと共に作業することを想定した設計となっており、ロボットに人が接触するとその場で安全に停止します。
また、アーム部の隙間により手や指の挟み込みを防止します。
■使いやすさ
簡単操作の「スマートペンダント」に対応し、初めてロボットを使用する人でも簡単操作でティーチングが可能。
また、ダイレクトティーチングによる直接教示も可能。
■ラインナップ
MOTOMAN-HCシリーズは、通常の仕様に加え、加工工程などでも使用可能な防塵・防滴仕様や、食品仕様のオプションに
対応しています。
■豊富なプラグイン対応周辺機器
MOTOMAN-HCシリーズを最適化する周辺機器が多数ラインナップ。
各種エンドエフェクタやビジョンセンサなど、様々なメーカーの周辺機器に対応しています。
>>株式会社安川電機公式:MOTOMAN-HC10DTPシリーズの製品ページはこちら
>>株式会社安川電機公式:Plug&Play対応周辺機器の紹介ページはこちら
近藤製作所のプラグイン対応周辺機器
近藤製作所では、各種エンドエフェクタを交換するためのツールチェンジャーをラインナップしております。
MOTOMAN-HCシリーズに直接取付が可能となっております。
本ページではMOTOMAN-HCシリーズに対応した製品の特長や仕様をご紹介させて頂きます。
また、図面のダウンロードも可能です。
1.ツールチェンジャー 製品紹介
MOTOMAN-HCシリーズに直接取付可能なツールチェンジャー。
ロボットのスライド動作で交換を行うメカ式(駆動源レス)と人の手で交換する手動式の2機種をラインナップ。
1-1.メカチェンジャー KHG-12
.png)
特長
■ロボットによるスライド動作でツールを交換。
■薄型でロボットに掛かる負荷を低減。
■エアーの使用に制約がある場合に。
仕様
↔ ※表は左右にスクロールしてご覧いただけます。
| 型式 | KHG-12 | ||
|---|---|---|---|
| 可搬質量(kg) | 12 | ||
| 駆動源 | ロボットアームによる着脱、もしくは手動 | ||
| 周囲温度(℃) | 5~60 | ||
| 位置再現精度(mm) | ±0.01 | ||
| 連結軸力(N) | 150 | ||
| 連結時モーメント(N・m) | 120 | ||
| 連結時トルク(N・m) | 195 | ||
| ツールホルダー可搬質量(kg) | 12 | ||
| 本体質量(kg) | R側 | 0.170 | |
| H側 | 0.234 | ||
| B側 | 0.462 | ||
| 空気インターフェース | 回路数 | 2本 | |
| オリフィス径 | φ3 | ||
| 使用圧力範囲 | -100kPa~0.7MPa ※真空保持はできません | ||
1-2.手動ツールチェンジャー KHF-12
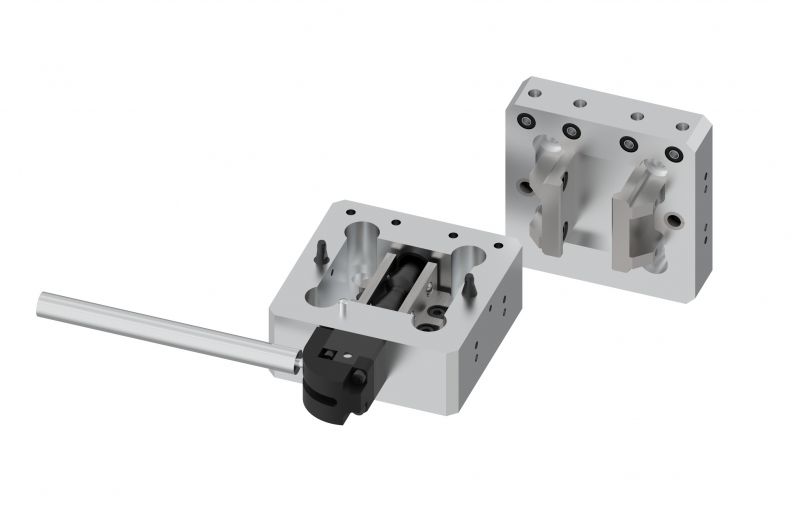
特長
■ 手動ワンタッチでツール交換。
(トグルクランプ方式採用)
■ ツール交換時の工数を削減。
■ ロボットに合わせた取付穴寸法。
仕様
↔ ※表は左右にスクロールしてご覧いただけます。
| 型式 | KHF-12 | ||
|---|---|---|---|
| 可搬質量(kg) | 12 | ||
| 駆動源 | 手動 | ||
| 周囲温度(℃) | 5~60 | ||
| 位置再現精度(mm) | ±0.01 | ||
| 連結軸力(N) | 1000 | ||
| 連結時モーメント(N・m) | 75 | ||
| 連結時トルク(N・m) | 180 | ||
| 本体質量(kg) | R側 | 0.280 | |
| H側 | 0.174 | ||
| 空気インターフェース | 回路数 | 4本 | |
| オリフィス径 | φ2.4 | ||
| 使用圧力範囲 | -100kPa~0.7MPa ※真空保持はできません | ||
1-3.ツールチェンジャー データダウンロード
下記より図面がダウンロードできます。
CADデータ
■メカチェンジャー KHG-12R/12H/12B
■手動ツールチェンジャー KHG-12R/H
お問い合わせ
お問い合わせ・ご相談はこちらから
「どんなハンドが最適か?」「希望の特注仕様は可能か?」などの技術的なお問い合わせや、
製品のお見積りや取扱店などの購入に関するご相談、その他ご不明な点がございましたら
お気軽にお問い合わせください。
お問い合わせフォームへ
