




HOME > ハンド&チャック ロボット周辺機器 > ツールチェンジャー > KHG:メカチェンジャー
KHG メカチェンジャー

ロボット動作でツールを交換。
■ロボットによるスライド動作でツールを交換。
■薄型でロボットに掛かる負荷を低減。
■エアーの使用に制約がある場合に。
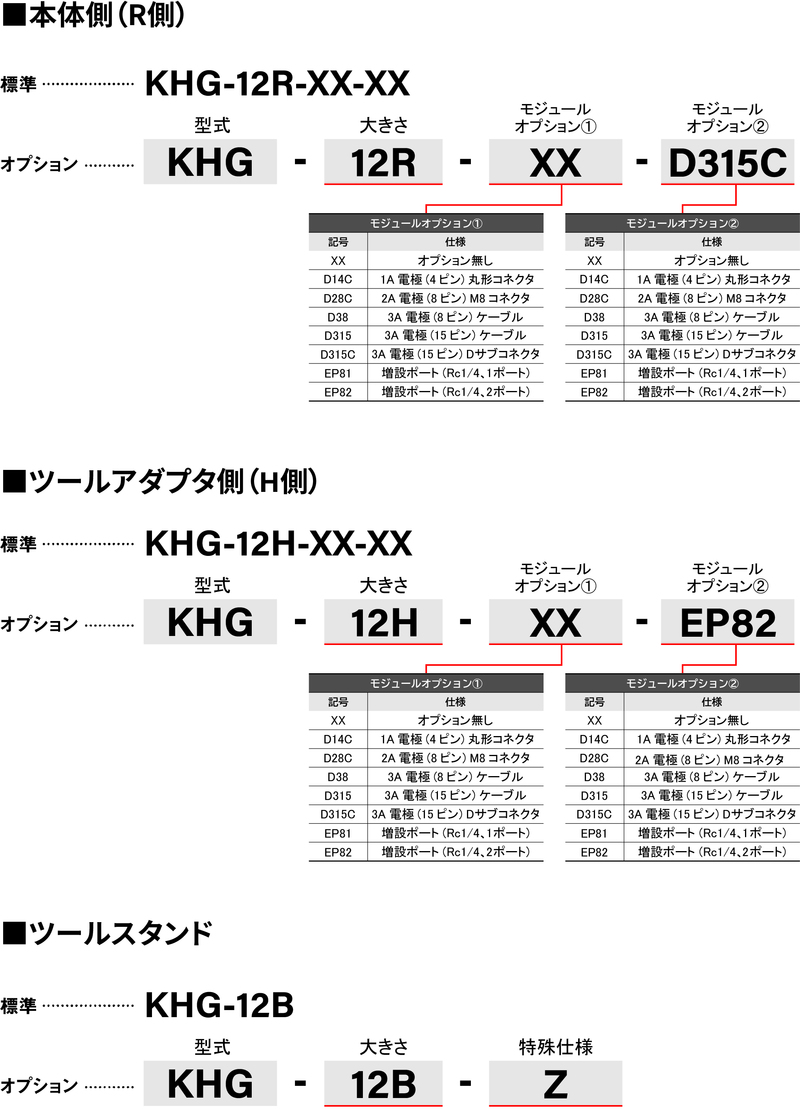
型式表示方法
仕様
表はスライドします →
| 型式 | KHG-12 | ||
|---|---|---|---|
| 可搬質量(kg) | 12 | ||
| 駆動源 | ロボットアームによる着脱、もしくは手動 | ||
| 周囲温度(℃) | 5~60 | ||
| 位置再現精度(mm) | ±0.01 | ||
| 連結軸力(N) | 150 | ||
| 連結時モーメント(N・m) | 120 | ||
| 連結時トルク(N・m) | 195 | ||
| ツールホルダー可搬質量(kg) | 12 | ||
| 本体質量(kg) | R側 | 0.170 | |
| H側 | 0.234 | ||
| B側 | 0.462 | ||
| 空気インターフェース | 回路数 | 2本 | |
| オリフィス径 | φ3 | ||
| 使用圧力範囲 | -100kPa~0.7MPa※ | ||
※真空保持はできません。
ダウンロード
カタログ(仕様書・寸法図)
カタログダウンロード| 型式規格 | オプション | DXFデータ | STEP、IGESデータ |
|---|---|---|---|
| KHG-12 | Z:特殊仕様 |  | |
