




HOME > 最新情報 > コラムvol.1 「ハンドチャック」とは
ニュース・トピックス
関連メニューを開く
コラムvol.1 「ハンドチャック」とは(2025-02-18)
ハンドチャックとは
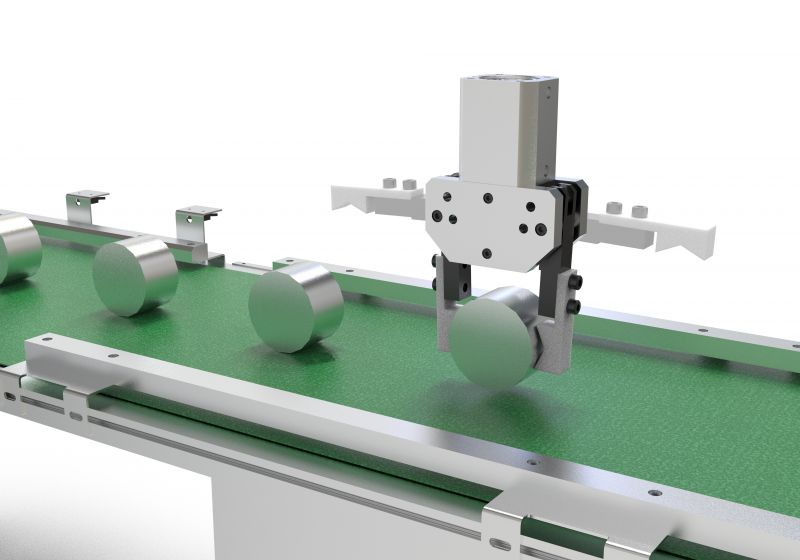
ハンドチャックとは、エンドエフェクタの1種で、産業用ロボットやローダーなどの
搬送装置の先端に取り付け、ワークをクランプ搬送するための機器です。

ハンドチャックは他にもエアグリッパ(単にグリッパとも)、ロボットハンド、ロボットチャックなどの
呼び方がありますが、このページではハンドチャックの名称で統一します。
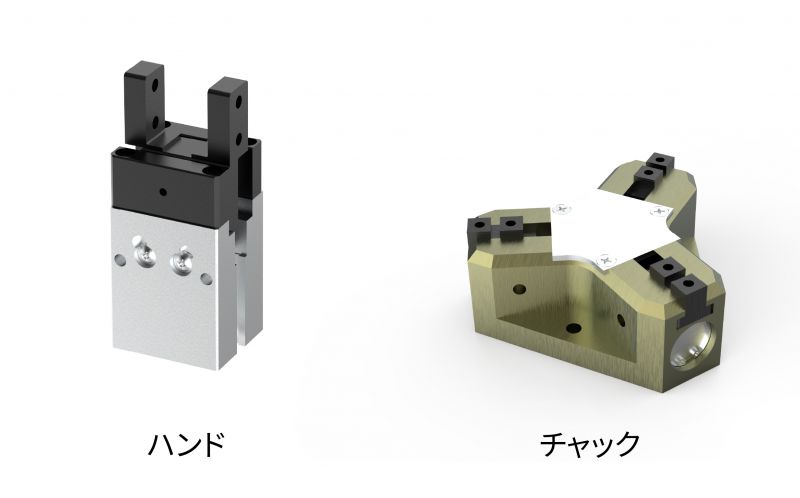
ハンドとチャックの違いとその特徴
ハンドとチャックの違い
ハンドチャックは爪の数によって、呼び方が異なります。
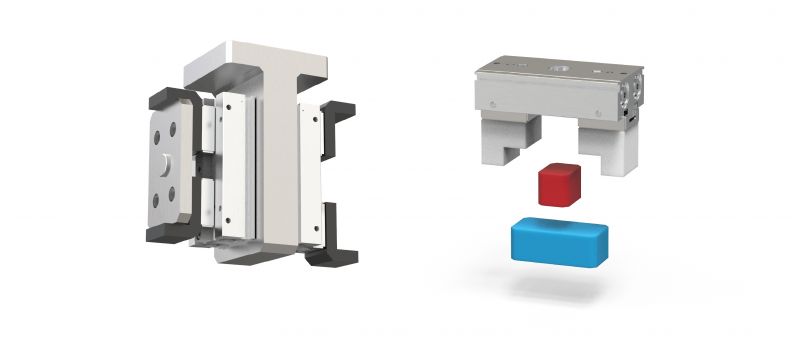
2爪のもの・・・ハンド
3爪・4爪のもの・・・チャック
KONSEIのハンドチャックは用途に応じて選定頂けるよう、様々な形状の製品を
ラインナップしており、更に細分化すると、下図の6種類に分類されます。

それぞれの製品の特長
・平行ハンド(縦型)
スタンダードな2爪ハンド。ボディの奥行が小さいので、複数配列に最適。

・平行ハンド(横型)
全高を抑えた2爪ハンド。薄型で背面合わせに対応、またストロークが長いのでワークの兼用にも対応。
・支点ハンド
爪が揺動開閉する2爪ハンド。上下移動なしでワークのクランプ/アンクランプが可能。
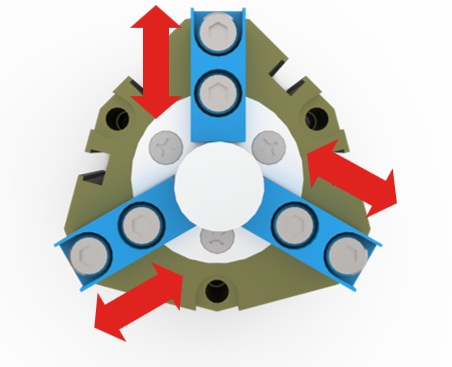
・3爪チャック(縦型)
スタンダードな3爪チャック。爪が求心動作し、丸形のワークでも安定した把持が可能。
・3爪チャック(横型)
全高を抑えた3爪チャック。薄型なので背面合わせに対応。
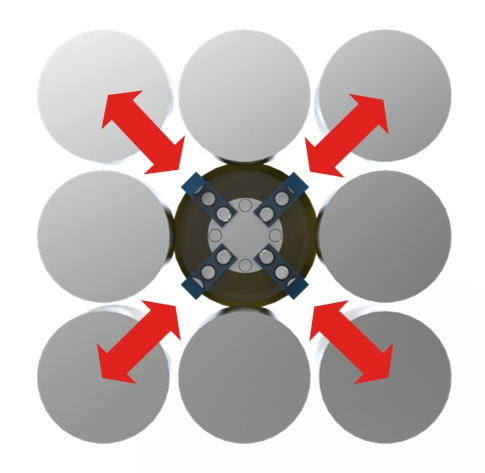
・4爪チャック
4隅の隙間に爪を進入させることが可能。円形ワークが密に並べられている場合に最適。
ハンドチャックの駆動源
ハンドチャックは駆動源によってエアハンド(エアチャック)、
電動ハンド(電動チャック)、メカハンド(メカチャック)の3種類に分けられます。
エアハンド(エアチャック)
仕組み:圧縮空気をシリンダ内部に入力することで開閉動作
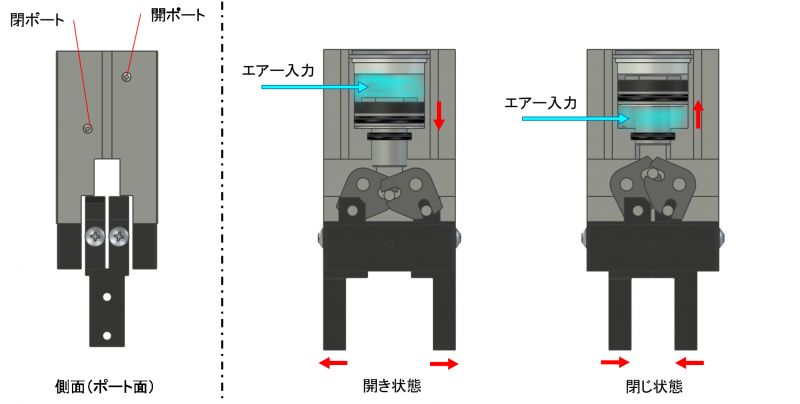
エアーハンドの特長1:シンプルな構造なので、コンパクトで高い把持力を出しやすい
エアーハンドの特長2:工場エアーを駆動源とするので導入が比較的容易
電動ハンド(電動チャック)
仕組み:電力・信号を入力することで開閉動作
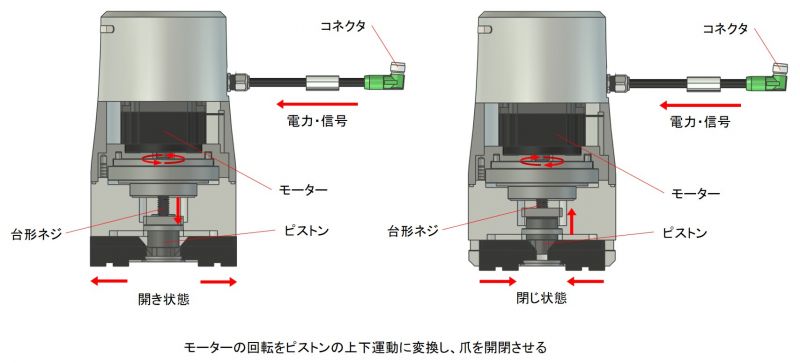
エアーハンドの特長1:モーターの制御により把持力調整や中間停止など複雑な動作が可能
エアーハンドの特長2:エアーを使用しないためコンプレッサや配管作業が不要。
また、カーボンニュートラルに対応。
メカハンド(メカチャック)
仕組み:シリンダなどでピストンを直接押すことで開き、スプリング力で把持
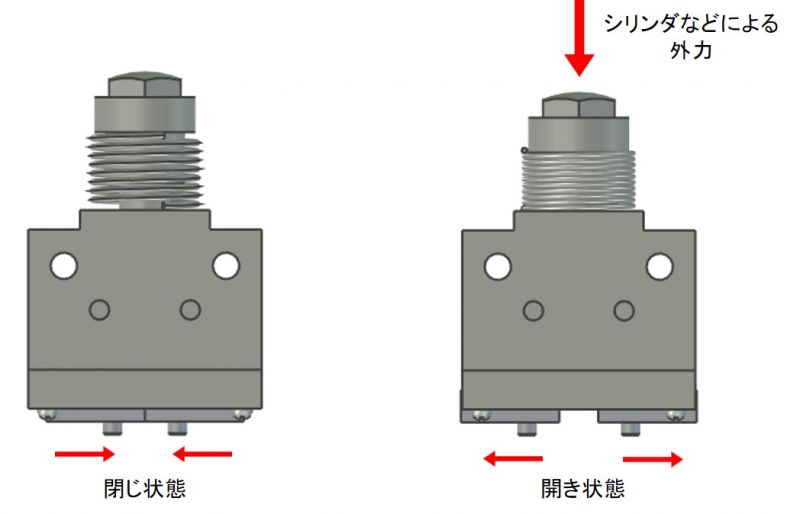
メカハンドの特長1:搬送中にエアーや電気が使えない装置で使用可能。
メカハンドの特長2:カム駆動などの高速タクトにも対応。
事例紹介
ハンドチャックの使用事例を4つ紹介します。
Case1 ロング爪を用いたバラ積みピッキング

箱の中に爪のみを進入させてワーククランプが可能。
Case2 切削液が掛かる加工機への供給・取り出し


爪部にパッキンを内蔵し、切削水の流入を抑制。
>>加工機への供給取り出しに最適な「耐切削水ハンド」の詳細はこちら
>>加工機への供給取り出しに最適な「耐切削水チャック」の詳細はこちら
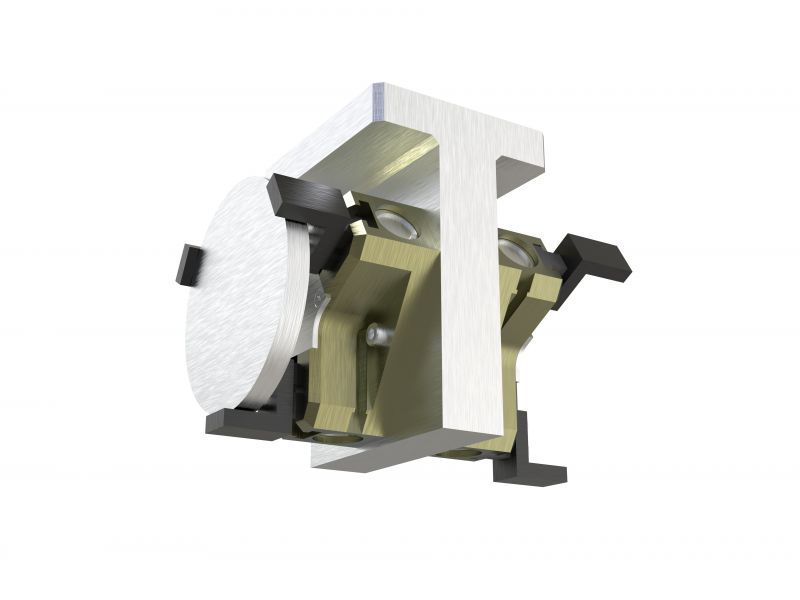
Case3 熱間鍛造・鋳造工程で800℃以上のワークの搬送
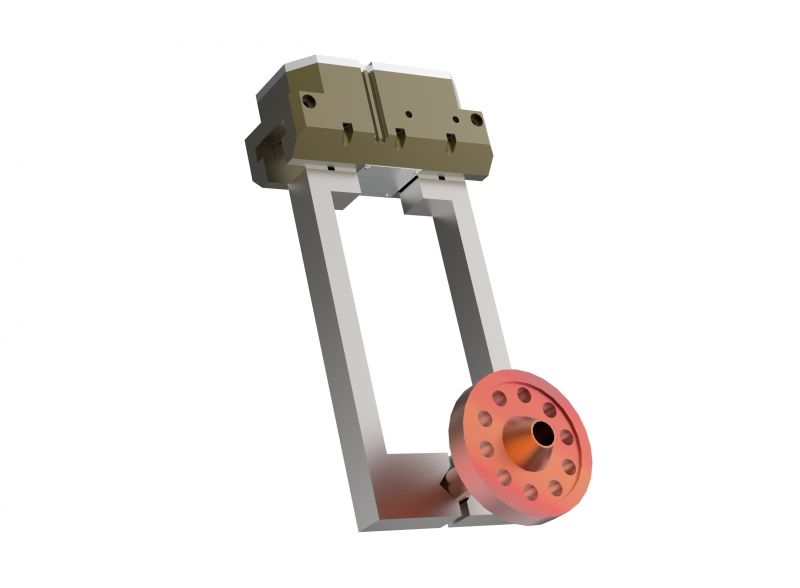
パッキンとグリスを耐熱性のものに変更し、ロング爪で本体から熱源から離して搬送可能。
>>熱間鍛造・鋳造工程に最適な「耐熱大把持力ハンド」の詳細はこちら
Case4 重量物の落下防止対策

シリンダ内部の強力なスプリングにより、エアーダウン時でもワークを落とさない。
>>重量物搬送工程の安全対策に最適な「大把持力ハンド(落下防止)」の詳細はこちら
>>重量物搬送工程の安全対策に最適な「大把持力チャック(落下防止)」の詳細はこちら
