




HOME > ハンド&チャック ロボット周辺機器 > 旋回 > ZRB:メカローター
ZRB メカローター

ラック式超小型回転アクチュエーター。
■ラック式で、エアーリークをカット。
■ベーン式に対し、40% サイズダウンで、徹底的に省スペース。
■同一面に「ストッパ」「配管」「センサ」が集合。
■取付が2方向から可能な通し穴。
■本体取付時の芯出しが容易な位置決め用ピン穴加工。
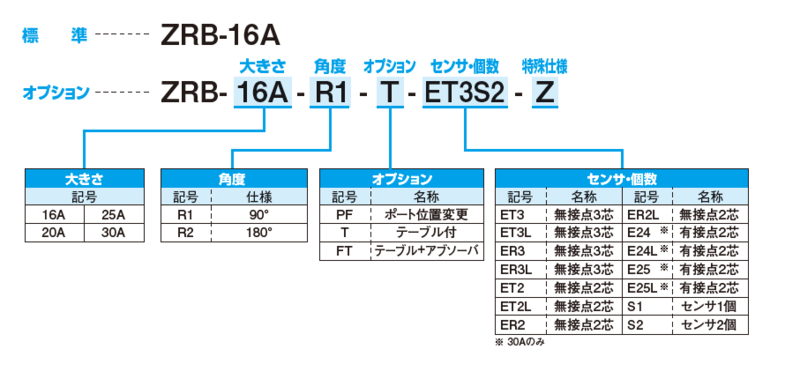
型式表示方法
仕様
表はスライドします →
| 型式 | ZRB-16A | ZRB-20A | ZRB-25A | ZRB-30A | ||
|---|---|---|---|---|---|---|
| 駆動源 | エアー0.15~0.7MPa | |||||
| 潤滑 | 無給油またはタービン油1種(ISOVG32) | |||||
| 周囲温度(℃) | 5~60 | |||||
| 旋回時間 | 0.1~1.5 S/90° | |||||
| 旋回角度 | 90°/180° | |||||
| シリンダ径(mm) | φ16×2 | φ20×2 | φ25×2 | φ30×2 | ||
| 反転トルク(N ・m-理論値) | 1.72×P | 3.40×P | 6.36×P | 11.12×P | ||
| 許容荷重 | ラジアル(N) | Fr | 29.2 | 59 | 84 | 127 |
| スラスト(N) | Fsa | 14.6 | 29.5 | 42 | 63.5 | |
| スラスト(N) | Fsb | 14.6 | 29.5 | 42 | 73 | |
| モーメント(N ・m) | M | 0.715 | 1.68 | 2.69 | 4.70 | |
| 許容運動エネルギー (J) | 標準 | 0.0146 | 0.0307 | 0.0479 | 0.0751 | |
| アブソーバ対応 | 0.68 | 0.68 | 0.68 | 0.68 | ||
| 本体質量 (kg) | R1 | 0.232 | 0.356 | 0.572 | 0.840 | |
| R2 | 0.266 | 0.444 | 0.726 | 1.088 | ||
ダウンロード
カタログ(仕様書・寸法図)
カタログダウンロード| 型式規格 | オプション | DXFデータ | STEP、IGESデータ |
|---|---|---|---|
| ZRB-16A-R1 | PF:ポート位置変更(正面側) T:テーブル付 FT:テーブル+アブソーバ |  | |
| ZRB-16A-R2 | PF:ポート位置変更(正面側) T:テーブル付 FT:テーブル+アブソーバ | | |
| ZRB-20A-R1 | PF:ポート位置変更(正面側) T:テーブル付 FT:テーブル+アブソーバ | | |
| ZRB-20A-R2 | PF:ポート位置変更(正面側) T:テーブル付 FT:テーブル+アブソーバ | | |
| ZRB-25A-R1 | PF:ポート位置変更(正面側) T:テーブル付 FT:テーブル+アブソーバ | | |
| ZRB-25A-R2 | PF:ポート位置変更(正面側) T:テーブル付 FT:テーブル+アブソーバ | | |
| ZRB-30A-R1 | PF:ポート位置変更(正面側) T:テーブル付 FT:テーブル+アブソーバ | | |
| ZRB-30A-R2 | PF:ポート位置変更(正面側) T:テーブル付 FT:テーブル+アブソーバ | | |
