




HOME > ハンド&チャック ロボット周辺機器 > 平行ハンド > LHC:手動着脱式ガイドチェンジャー
LHC 手動着脱式ガイドチェンジャー

ワンタッチ着脱で段取り変え時間短縮!
■ガイド部のみ交換の為、段取り変え時間短縮。
■ワンタッチでガイド部の交換が可能。
■軽量かつコンパクト設計。
■繰り返し着脱精度0.05mm以下。
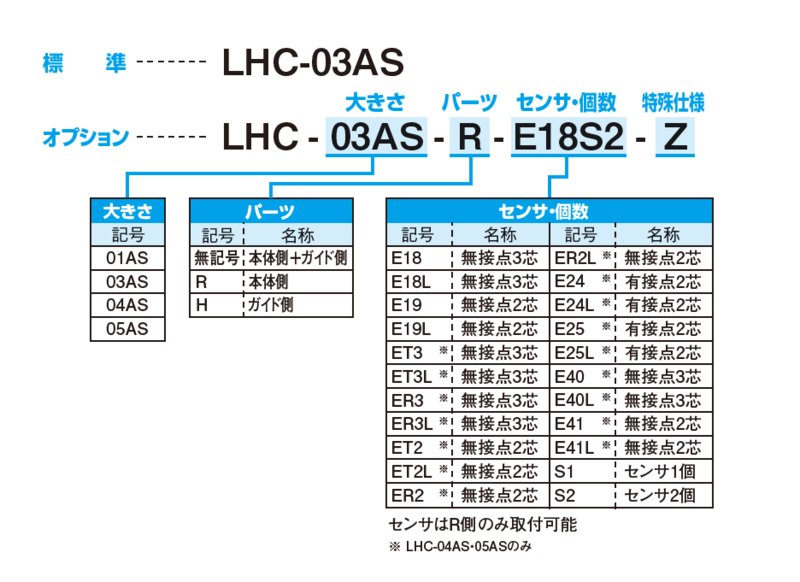
型式表示方法
仕様
表はスライドします →
| 型式 | LHC-01AS | LHC-03AS | LHC-04AS | LHC-05AS |
|---|---|---|---|---|
| 駆動源 | エアー0.2~0.7MPa | エアー0.1~0.7MPa | ||
| 潤滑 | 無給油またはタービン油1種(ISOVG32) | |||
| 周囲温度 (℃) | 5~60 | |||
| 動作ストローク (mm) | 4 | 6 | 10 | 14 |
| シリンダ径 (mm) | φ10 | φ16 | φ20 | φ25 |
| ロッド径 (mm) | φ6 | φ8 | φ10 | φ12 |
| 内部容積 [往復] (cm³/回) | 0.3 | 1.4 | 2.8 | 6.1 |
| 繰り返し精度 (mm) | ±0.01 | |||
| 繰り返し着脱精度 (mm) | ±0.05以下 | |||
| 連結軸力(N) | 4.2 | 10.8 | 16.4 | 25.4 |
| 連結時モーメント(N・m) | 0.24 | 0.68 | 1.32 | 1.94 |
| 連結時トルク (N・m) | 0.13 | 0.37 | 0.92 | 0.95 |
| R側質量 (kg) | 0.036 | 0.080 | 0.140 | 0.236 |
| H側質量 (kg) | 0.026 | 0.064 | 0.134 | 0.246 |
ダウンロード
カタログ(仕様書・寸法図)
カタログダウンロード| 型式規格 | オプション | DXFデータ | STEP、IGESデータ |
|---|---|---|---|
| LHC-01AS | Z:特殊仕様 |  | |
| LHC-03AS | Z:特殊仕様 | | |
| LHC-04AS | Z:特殊仕様 | | |
| LHC-05AS | Z:特殊仕様 | | |
