




HOME > ハンド&チャック ロボット周辺機器 > 平行ハンド > HLB:薄型平行ハンド(クロスローラタイプ)
HLB 薄型平行ハンド(クロスローラタイプ)

滑らか作動で高精度な薄型平行ハンド
■クロスローラタイプ。
クロスローラタイプのベアリングガイドで、滑らかで高精度な作動を実現。
■コンパクトでロングストローク。
全高が低く、コンパクト設計。
ストロークが長いので、大小のワークに兼用対応できます。
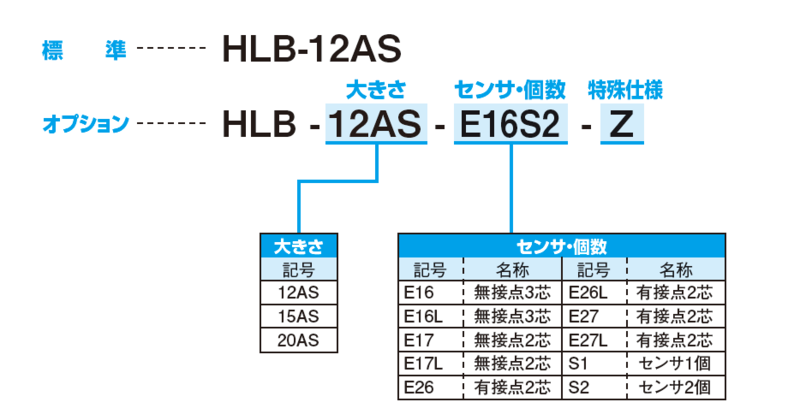
型式表示方法
仕様
表はスライドします →
| 型式 | HLB-12AS | HLB-15AS | HLB-20AS |
|---|---|---|---|
| 駆動源 | エアー0.1~0.7MPa | ||
| 潤滑 | 無給油またはタービン油1種(ISOVG32) | ||
| 周囲温度 (℃) | 5~60 | ||
| 動作ストローク(mm) | 13 | 18 | 23 |
| シリンダ径(mm) | φ12 | φ15 | φ20 |
| 内部容積[往復](cm³/回) | 1.47 | 3.18 | 7.22 |
| 繰り返し精度 (mm) | ±0.01 | ||
| 本体質量 (kg) | 0.214 | 0.402 | 0.678 |
ダウンロード
カタログ(仕様書・寸法図)
カタログダウンロード| 型式規格 | オプション | DXFデータ | STEP、IGESデータ |
|---|---|---|---|
| HLB-12AS | Z:特殊仕様 |  | |
| HLB-15AS | Z:特殊仕様 | | |
| HLB-20AS | Z:特殊仕様 | | |
