




HOME > ハンド&チャック ロボット周辺機器 > 平行ハンド > BHA:メカハンド
BHA メカハンド

スプリングによる把持。
■エアー配管が使えないロータリーテーブルやシャトルムーバ用ハンドに最適。
■スプリング力により外径を把持、パッキンを使わないため耐熱用ハンドに最適。
■開き側は外力による駆動、カム駆動等の高速タクトに対応。
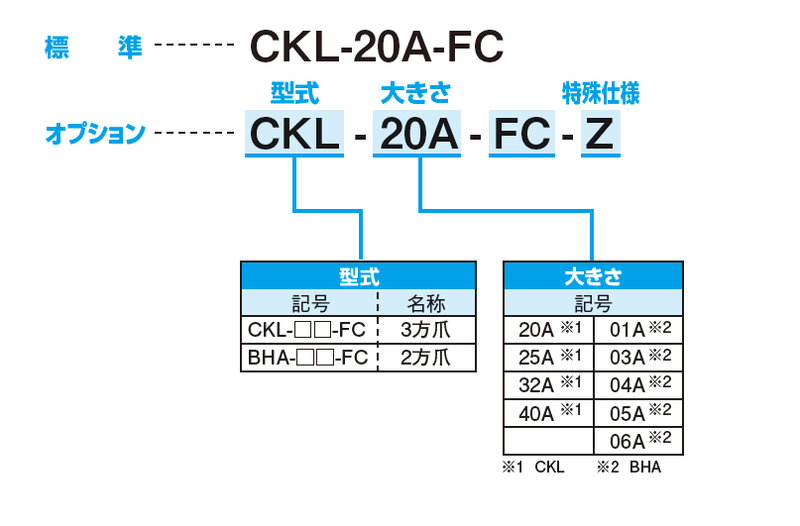
型式表示方法
仕様
表はスライドします →
| 型式 | BHA-01A-FC | BHA-03A-FC | BHA-04A-FC | BHA-05A-FC | BHA-06A-FC |
|---|---|---|---|---|---|
| 動作ストローク(mm) | 5 | 9 | 11 | 15 | 20 |
| シリンダ径(mm) | φ12 | φ16 | φ20 | φ25 | φ32 |
| ロッド径(mm) | φ6 | φ8 | φ10 | φ12 | φ16 |
| 開き側外力(N) | 60~90 | 120~180 | 185~280 | 230~350 | 400~600 |
| 繰り返し精度(mm) | ±0.01 | ||||
| 把持力(N) | 25~39 | 40~75 | 40~110 | 90~150 | 140~200 |
| 本体質量 (kg) | 0.142 | 0.212 | 0.362 | 0.594 | 1.342 |
※把持力は、爪の長さ・ストローク位置で変わります。
※開き側外力はストロークを規制してご使用ください。本体が破損するおそれがあります。
※開き方向での使用はハンドの破損につながりますので、絶対に行わないでください。
ダウンロード
カタログ(仕様書・寸法図)
カタログダウンロード| 型式規格 | オプション | DXFデータ | STEP、IGESデータ |
|---|---|---|---|
| BHA-01A-FC | Z:特殊加工 |  | |
| BHA-03A-FC | Z:特殊加工 | | |
| BHA-04A-FC | Z:特殊加工 | | |
| BHA-05A-FC | Z:特殊加工 | | |
| BHA-06A-FC | Z:特殊加工 | | |
