




HOME > ハンド&チャック ロボット周辺機器 > ユニット商品
ハンド&チャック ロボット周辺機器リスト
ユニット商品

高速旋回Wチャックユニット
EXM
サーボモータ駆動によるスイベル式旋回ユニット。
■旋回時間0.6秒
高速旋回時に発生する衝撃・振動をサーボモータで制御
サイクルタイムの大幅短縮を実現いたします
■耐環境性
モータをアーム上部に取り付けるため、切削油等の影響を受けません
■スキマ調整機構付
回転軸のガタ調整が可能で高耐久性。メンテナンスが簡単に行えます
■ライン構成自由自在(モータ、タイミングベルトはお客様手配)
タイミングベルト用プーリーを標準装備
お客様の仕様にあったライン構成を構築できます
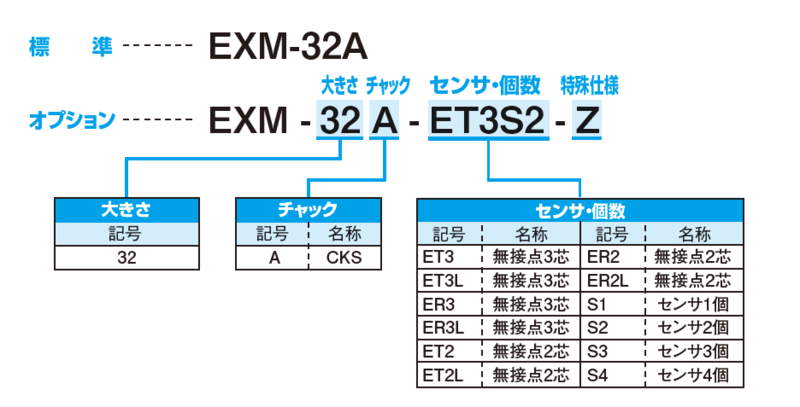
型式表示方法
仕様
表はスライドします →
| 型式 | EXM-32A | |
|---|---|---|
| 駆動源 | 旋回 | サーボモータ(お客様にて選定・手配) |
| ハンド | エアー0.2~0.7MPa | |
| 潤滑 | 旋回 | 極圧添加剤入り潤滑油(VG150) |
| ハンド | 無給油又はタービン油1種(VG32) | |
| 周囲温度(℃) | 5~60 | |
| 旋回時間 | 0.6sec以上/180° | |
| 対象ワーク質量(kg) | 5 | |
| 対象チャック型式 | CKS-32AS | |
| 動作ストローク(mm) | 32 | |
| 把持力(P=0.5Mpa) | 900N | |
| 繰り返し精度 | 旋回 | ±0.05(チャック端面) |
| ハンド | ±0.01 | |
| 本体質量(kg) | 8.3 | |
■サーボモータ選定基準
| 旋回軸減速比 | 40:1 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 許容運動エネルギー(J) | 2.5 | |||||||||
| プーリー回転数(rpm) | 300 | 600 | 900 | 1200 | 1500 | 1800 | 2100 | 2400 | 2700 | 3000 |
| 許容旋回トルク(N・m) | 51.4 | 43.6 | 38.5 | 34.9 | 31.6 | 30.7 | 28.4 | 26.8 | 25.6 | 25 |
| 旋回トルク伝達率(%) | 46 | 52 | 55 | 59 | 60.2 | 61.1 | 61.9 | 62.3 | 63.2 | 64.7 |
●使用例
ワーク質量4kg、チャック爪長さ50mm、旋回時間0.6秒の場合400Wサーボモータを使用。
(モータ型式MSM042P1A panasonic製)
※対象ワーク質量は爪の長さにより変わります。
対象チャック型式の把持力からご検討ください。
ダウンロード
カタログ(仕様書・寸法図)
カタログダウンロード| 型式規格 | オプション | DXFデータ | STEP、IGESデータ |
|---|---|---|---|
| EXM-32A |  | |
